Building Smart LEGO MINDSTORMS EV3 Robots
Posted by FlagsNZ,
Earlier this year Kyle Markland announced that he had written and published a book called Building Smart LEGO MINDSTORMS EV3 Robots. I immediately offered to review the book as the title appealed to me: I wanted to learn how to build smarter EV3 robots.
Kyle Markland's book describes some complex EV3 programming in an easy-to-read writing style and explains both the engineering and programming concepts in an easy-to-follow way. Kyle takes readers through a series of six models; each model utilises a different building and programming concept.
MINDSTORMS is a theme that I have dabbled in over the years however it is not a theme that is represented in Brickset News very often.
Read on as I review Building Smart LEGO MINDSTORMS EV3 Robots in the first of six model reviews based on the projects in this book.
Building Smart LEGO MINDSTORMS EV3 Robots
Kyle Markland introduces readers to the robotics found in everyday life. He looks at robotic vacuum cleaners right through to autonomous, or self-driving, cars. In these examples, Kyle explains that the programming required by these two examples differs quite considerably: the robotic vacuum cleaners quietly bump around a house and clean up dust while autonomous cars must make complex observations about the outside world in order to drive safely in a chaotic road environment.
The six projects in Building Smart LEGO MINDSTORMS EV3 Robots also include a range of robotic complexities. The six projects are:
- Security Tank – Object Tracking Robot
- Omnilander – Ultimate All Terrain Vehicle
- Timmyton – Interactive Robotic Shark
- Grunt – Quirky Bipedal Robot
- Falcon – Remote Control Race Car
- GPS Car – Autonomous EV3 Navigation
These six models have discreet learning outcomes that start off with quite simple tasks and finish with an EV3 controlled autonomous smart vehicle that is equipped with a GPS receiver and a digital magnetic compass, and has smart software which allows the car to navigate to a pair of coordinates defined by the user.
Target audience
Building Smart LEGO MINDSTORMS EV3 Robots explores the six EV3 projects that range from a low intermediate level to an advanced level. The book is for anyone who is interested in getting started with robotics and wants to learn building and programming concepts so that they can start making their own robots.
Readers should be familiar with the basics of using an EV3 Intelligent Brick and its graphical programming interface and have experience with the LEGO Technic building system.
In particular, readers should have some experience with the MINDSTORMS graphical programming blocks and be used to running data wires between blocks.
EV3 standard parts
EV3 MINDSTORMS comes in two standard sets: 31313 Mindstorms EV3 and 45544 Education EV3 Core Set.
Apart from the Timmyton – Interactive Robotic Shark, the models assembled from this book use more sensors and motors than are found in the standard EV3 Sets. Additional sensors and motors can be sourced from LEGO Online or Bricklink.
The GPS Autonomous EV3 Navigation Car uses a third-party GPS receiver.
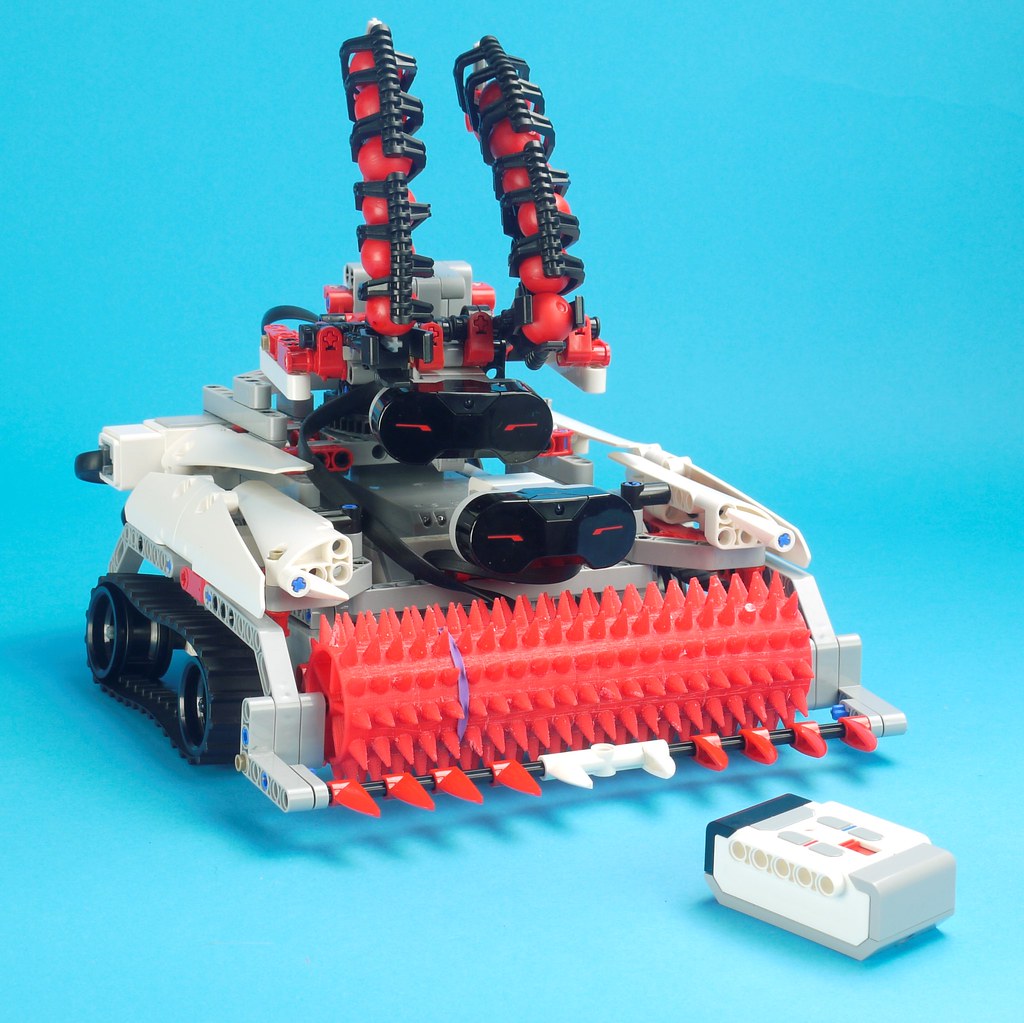
Security Tank – Object Tracking Robot
The Security Tank senses and follows an EV3 Infrared Remote. As the Infrared Remote (acting as a beacon) moves about, the Security Tank steers around and follows it.
The program uses both direction and magnitude values of the infrared signal from the beacon to adjust the steering. This is called a proportional beacon follower, and it enables the robot to make smooth driving adjustments.
The first (lower) infrared sensor reads the heading of the nearby beacon, and the robot will use the heading value to adjust its steering to keep itself on track with the beacon. This sensor will also measure the distance to the beacon so that it can slow down when the beacon gets closer.
The second (upper) infrared sensor is used to aim the turret in the direction of the beacon.
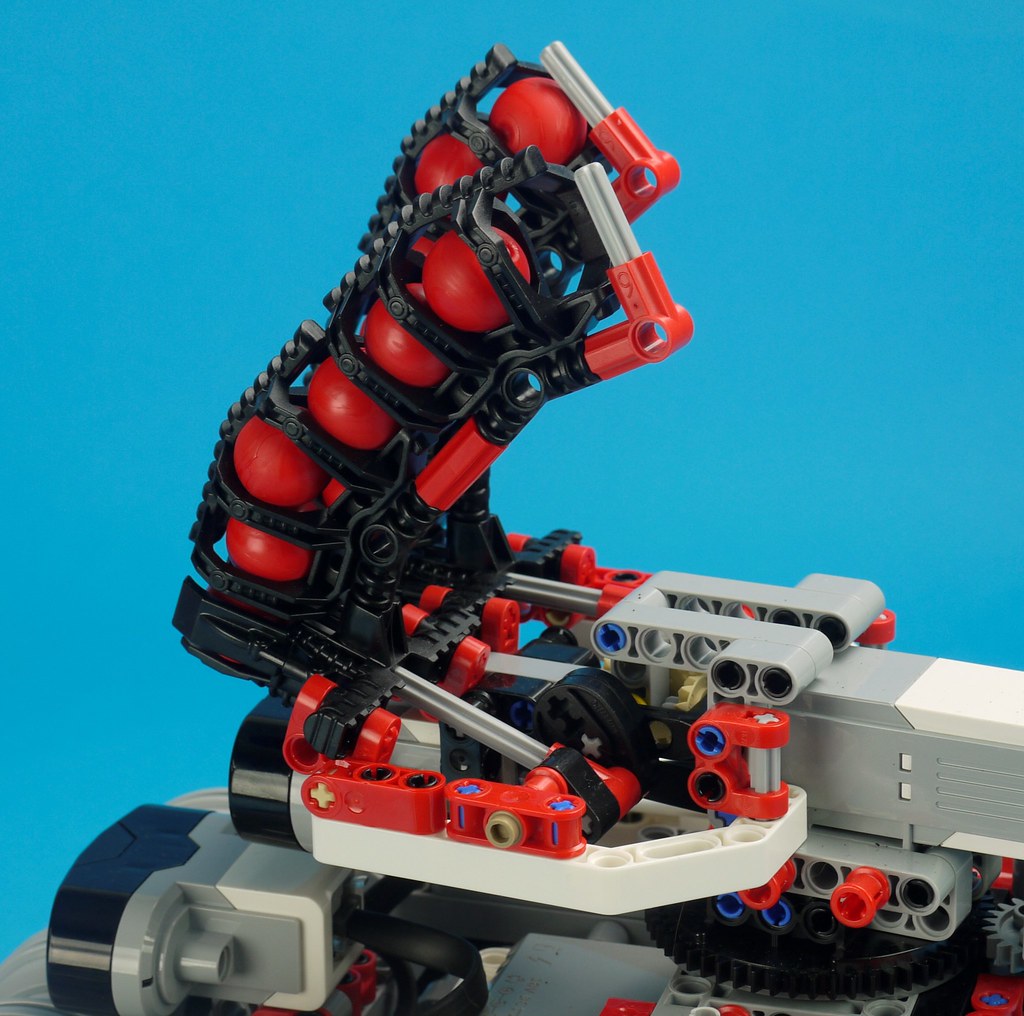
When the turret locks on to the beacon, the robot will fire two projectiles. A Medium
Servo Motor controls the ball-launching mechanism.
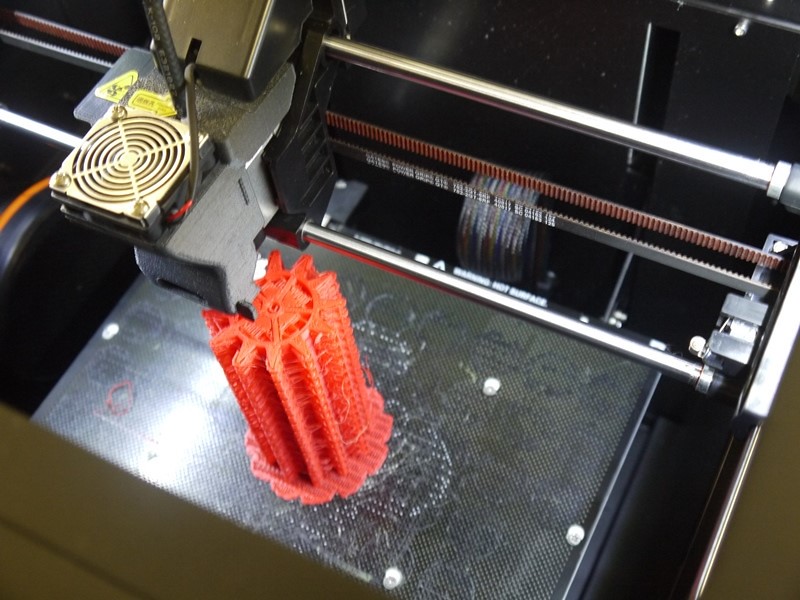
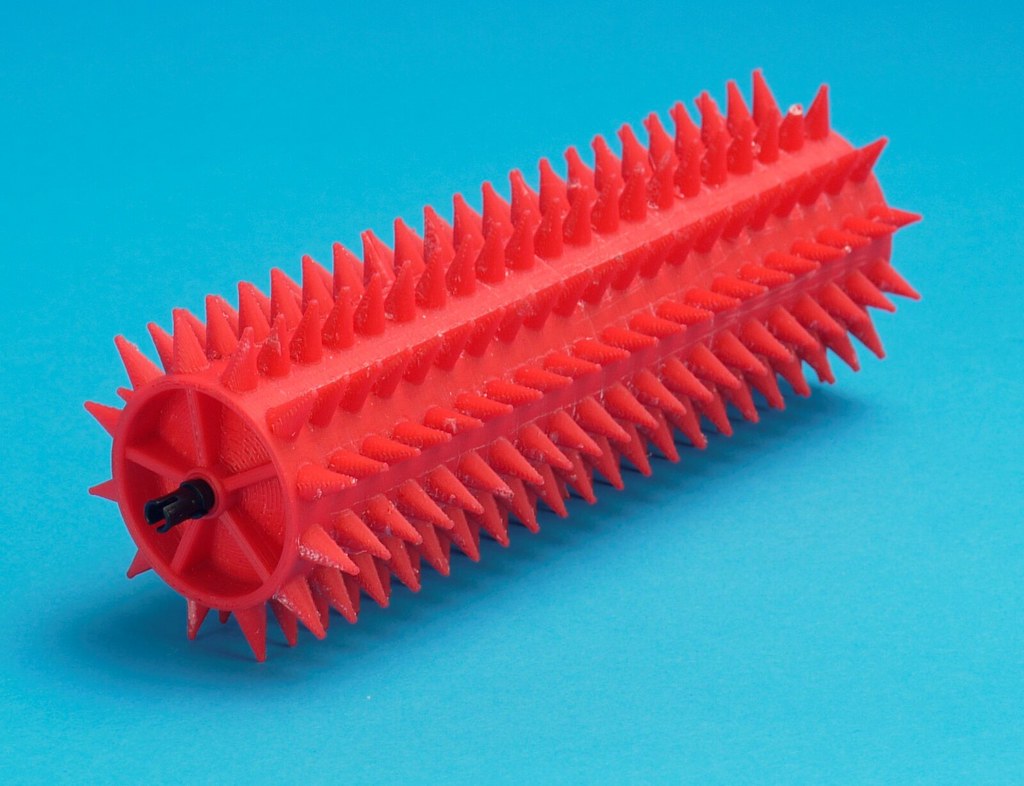
Spiky Roller
One of the projects included in building the Security Tank is manufacturing a Spiky Roller using a 3D printer. The link to the 3D file is included with the book.
This task of producing the 3D part took me some time to complete: first I needed to source suitable ABS filament and then I had to figure out how to calibrate and operate the 3D printer. The outcome is that I have printed my first 3D part after some trial and error.
It took 15 hours to print this part using an UP Box printer. Fortunately, the Security tank is the only project in this book that uses a custom 3D printed part.
The Spiky Roller had quite a lot of sprue around the "spikes". It took a short while to remove all this waste plastic before it looked like a finished product.
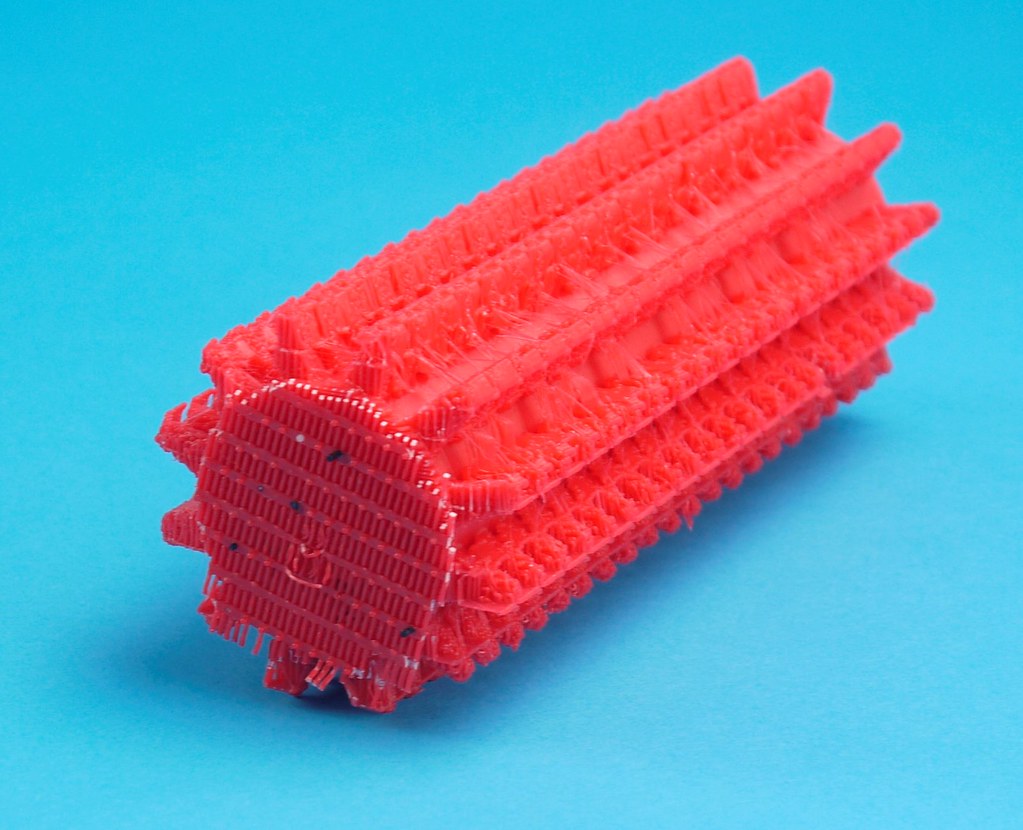
The completed Spiky Roller.
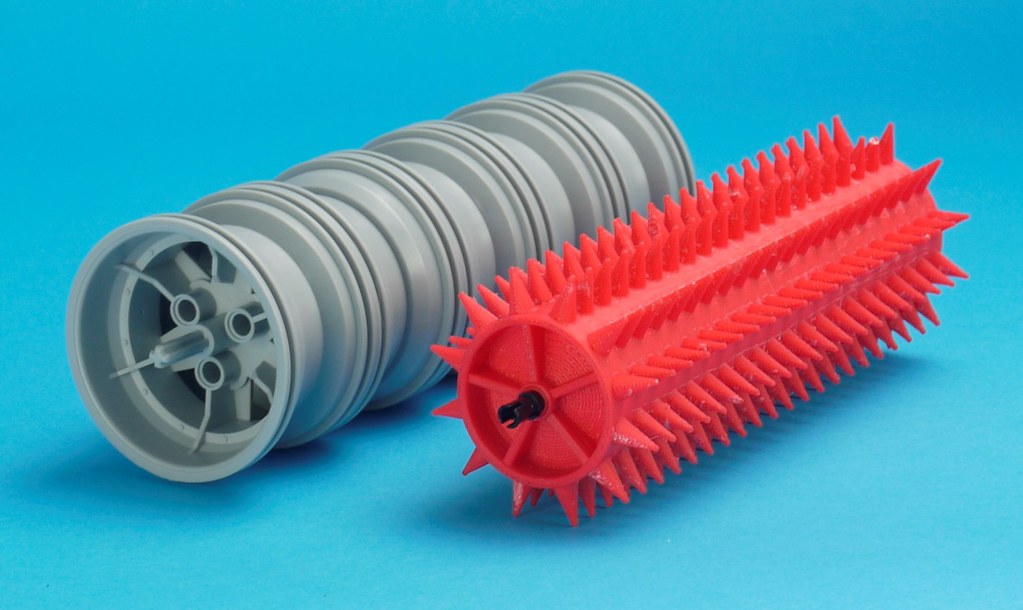
If you don't have access to a 3D printer, you can use five 56 x 34 wheel rims.
Purists
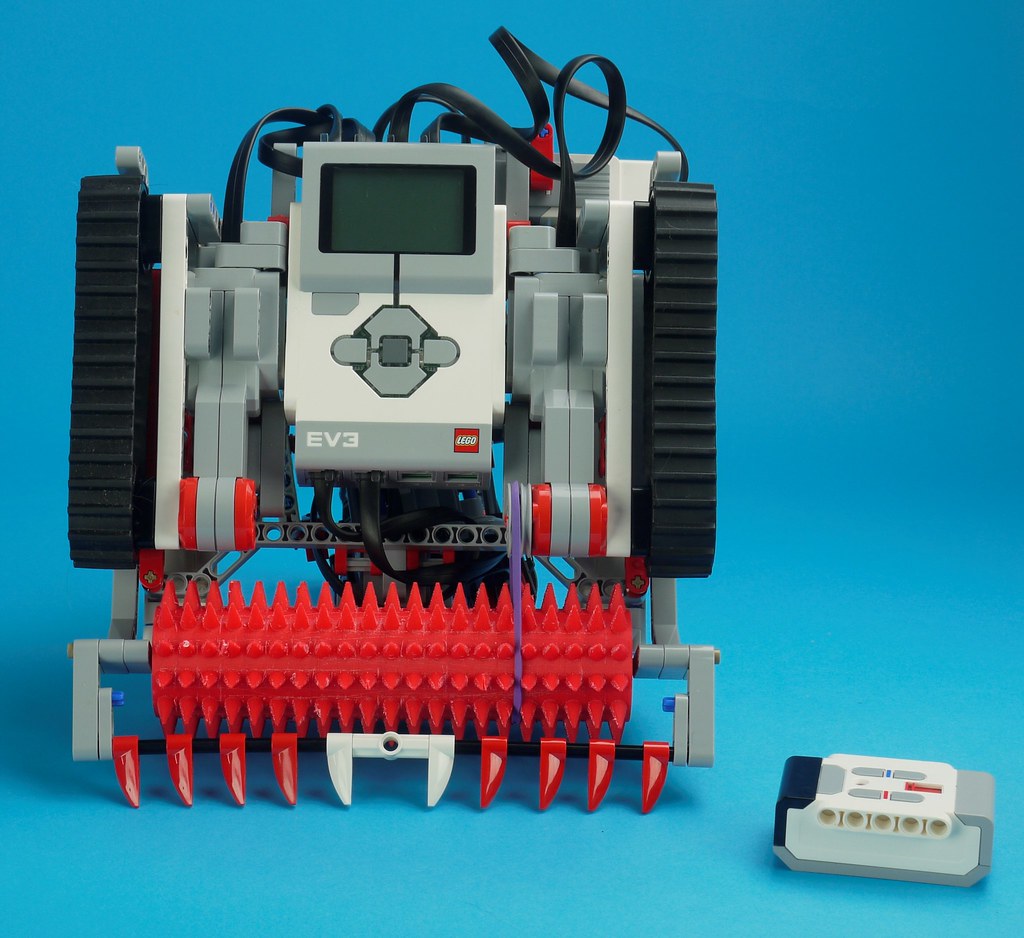
Here is the assembled Security Tank using the 56 x 34 wheel rims in lieu of the 3D printed Spiky Roller.

This assembly is "illegal" and cannot be rendered in LEGO Digital Designer as the edge of the rim rubs against the chassis of the Security tank.
The completed model
Here is Kyle Markland's short video showing the Security Tank in action.
Additional EV3 Parts
The Security Tank utilises two EV3 Infrared Sensors and two Medium Servo Motors.
The standard 31313 EV3 set comes with only one such sensor and one Medium Motor. The 45544 Education EV3 Core Set does not include any Infrared Sensor and has only one Medium Motor.
These extra EV3 Sensor and motors can be sourced from LEGO Online or Bricklink.
There are additional Technic parts needed to build this model but they are mostly used for aesthetic reasons.
How it works
Here is the basis of the programming codes: values from IR Senor 1 (the lower infrared sensor) is controlling the tank steering values in both magnitude of steering and the rotational speed of the Large Servo Motors.
Values from IR Senor 2 (the upper infrared sensor) is controlling the turret motor (motor D).
Motor A (just to the right of the image) fires the turret.
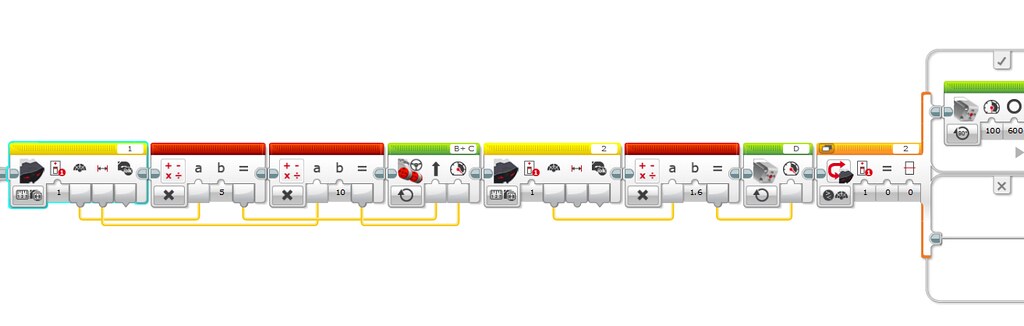
An eccentric firing mechanism fires balls at you at a great velocity when IR Senor 2 detects a 0° turret angle with the IR Beacon. The magazines - or ammo silos - each contain six ball missiles.
You will have some serious fun with this model but your pets will probably disagree and soon scatter.
The robot is unforgiving and will empty its magazines very quickly as it tracks the IR Beacon - and you holding it - quickly.
While building the model and testing the programming I quickly learnt not to have any ammunition in the magazines. Keeping the silos empty restored my sanity.
Maintenance
The EV3 Intelligent Brick is positioned in such a way that it can be viewed when the robot is upside down. The USB port is easily accessed from the rear of the robot so it can be tethered to your device while programming using the standard USB cable.
It is also quite easy to swing the brick out to replace the batteries.
The Spiky Roller - or the five-wheel-rims roller - is driven by a rubber band rove around the small pulley attached to the right drive motor.
About the author - Kyle Markland - Builderdude35
Kyle Markland started experimenting with MINDSTORMS when he was 12 years old. His first major build was the Timmyton Robotic Shark, and the first functional version was v3.5. He has made incremental improvements to the Timmyton over the years, which has brought him to the current version (v5.7), which is very polished and user-friendly.
Kyle then worked on other MINDSTORMS creations and RC cars along with an early version of the Omnilander, and X-TERRA. He started documenting his creations on his YouTube channel with the username Builderdude35.
(The Timmyton – Interactive Robotic Shark will be the focus of the next review)
His first video tutorial appeared in February 2015 which was warmly received by an enthusiastic, albeit small group in the online community. They encouraged him to make more videos, and he made the commitment to publish a new tutorial every week.
These tutorials have become very popular over the years and have caught the attention of The LEGO Group; He was named a MINDSTORM Community Partner (MCP) in 2017 in recognition of his efforts to promote robotics education.
Kyle Markland is only 17 years old and has recently been accepted into Massachusetts Institute of Technology for next September’s intake; the admissions committee at MIT was very impressed by his YouTube channel, and it was a big part of the reason why he was accepted. And of course, attention from the YouTube channel led to his book.
Building Instructions
The book contains links to Kyle Markland's website (www.builderdude35.com) where all the projects’ files can be can be downloaded. The instructions can be rendered through LEGO Digital Designer Builder Guide Mode but Kyle has made a better, user-friendly, PDF version available.
Initially the instructions were only available using the LDD format but Kyle, to his credit, has put a great deal of effort into preparing the better PDF versions and making them available online.
Here are the PDF instructions for the Security Tank model. Kyle will finish the Security Tank building instructions after he completes his final exams. They are significantly better than using the LDD version.
Overall
I found Kyle Markland's writing style very easy to read. He explains the physical building process of his models in detail and always links the engineering concepts he demonstrates to real-world examples.
The programming concepts are equally well described. There are clear references to the values set at various stages to the gear ratios of the Technic gearing.
The programming steps are laid out in easy to read, colour diagrams.
He challenges readers to experiment with alternate programming values and to test the results.
I also liked the fact that his models differ from other EV3 books that I have read. He steers away from the usual maze-solver and line-follower styled robots that are common in these other EV3 programming text books.
If you have mastered building and programming EV3 robots and want to take your programming knowledge to the next level, then Kyle Markland's Building Smart LEGO MINDSTORMS EV3 Robots is right for you.
Over the last few months, I have developed a really great relationship with Kyle Markland as I work through the projects in his book. This is despite us living 16 time zones apart. I wish him well in his journey at Massachusetts Institute of Technology. There is every chance that he could be a designing force in any future successor to the EV3 MINDSTORMS Robotics theme.
Kyle Markland's Building Smart LEGO MINDSTORMS EV3 Robots is available now as an eBook or paperback.
The book can be purchased from Packt in EPUB, PDF, MOBI or paperback formats.
A Kindle or paperback version is available from Amazon.
This eBook was provided for review by Packt Publishing Limited but the review is an expression of my own opinions.
29 likes
5 comments on this article
"This is despite us living 16 time zones apart.". Unless you moved out of England, I assume you mean 6? ;)
What type of programming does he use for the autonomous driving model? Neural nets?
@Block-n-Roll - Oh good grief... I always notice when someone else calls out Huw as the article author when it's clearly listed as someone else, and now I've done that same mistake myself! Sorry about that FlagsNZ! *Slinks back to the shadows with egg on face*
What a super review of a not-so-mainstream LEGO topic!
packtpub.com , Copy and paste the following code at checkout to receive 90% off:
SAVE90MAY2018
Please note this code can only be used once and expires May 31st 2018.